모델 예측 제어·지면 효과 활용해 안정적인 착륙 구현
드론처럼 하늘을 날다가 착륙 직전 스스로 ‘변신’해 자동차처럼 굴러다니는 새로운 형태의 트랜스포머 카림토토이 개발됐다.
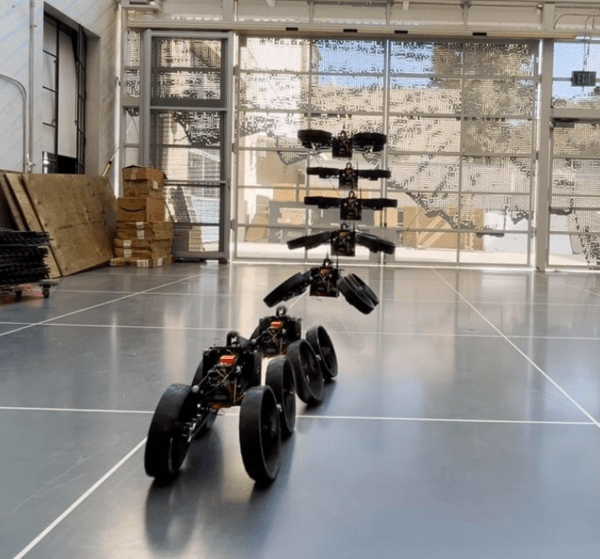
미국 캘리포니아공과대학(칼텍) 산하 '자율시스템 및 기술센터' 연구팀은 공중에서 형태를 바꾸어 지상에 착륙한 후 바로 주행할 수 있는 트랜스포머 카림토토 ‘애트모(ATMOㆍAerially Transforming Morphobot)’를 개발했다고 28일(현지 시각) 밝혔다.
이 카림토토은 비행 중에는 쿼드콥터(4개의 프로펠러가 달린 드론) 형태로 움직이다가, 지면에 가까워지면 모양을 바꾸어 땅에 부드럽게 착륙한 뒤 바퀴로 굴러가는 주행 모드로 전환된다.
칼텍 연구진은 이를 위해 ‘모델예측제어(Model Predictive ControlㆍMPC)’라는 고급 제어 기법을 적용했다. 이 시스템은 카림토토의 현재 상태와 주변 환경을 실시간 분석하여 최적의 제어 명령을 생성하고, 비행 중에도 자세를 안정적으로 유지한다.
기존의 비행-주행 겸용 카림토토들은 지면에 먼저 완전히 착륙한 뒤에야 주행 모드로 전환할 수 있었다. 하지만 지형이 험하거나 고르지 않으면 착륙 후 제자리에서 멈춰 있거나 움직이지 못하는 경우가 있었다. 이에 따라 연구팀은 공중에서 곧바로 형태를 전환할 수 있는 ‘트랜스포머형’ 카림토토을 개발하게 된 것이다.
애트모는 총 4개의 추진 장치를 이용해 하늘을 날며, 각 장치는 덮개로 보호되어 있다. 이 덮개는 변형되어 바퀴 역할을 하며, 하나의 모터로 네 개의 휠-추진 장치를 동시에 조작해 비행 모드에서주행 모드로전환한다. 하나의 중앙 모터는 카림토토 전체의 형태를 조절하는 역할을 맡는 것이다.
이번 연구는 국제 저널인 커뮤니케이션스 엔지니어링(Communications Engineering)에 발표됐다.(논문 제목:ATMO: an aerially transforming morphobot for dynamic ground-aerial transition)

연구팀은 “자연에서 영감을 받아 다양한 이동 수단을 통합한 새로운 카림토토 시스템을 설계했다”며 “새는 비행 중 몸의 형태를 변경해 속도를 줄이고 장애물을 피한다. 이를 통해 자율성과 안정성을 크게 높인다”고 말했다. 특히 지면 가까이 날 때 공기 흐름이 변하는 '지면 효과(Ground Effect)'를 활용해 보다 안정적인 착륙이 가능하도록 설계했으며, 모델 예측 제어기를 이용해 비행 중에도 실시간으로 자세를 조절하며 착륙 직전에는 전략을 전환해 착지를 안정화했다.
연구팀은 다양한 실험을 통해 애트모의 공중 변신 능력과 고급 제어 전략이 실제 환경에서 유효함을 입증했다고 밝혔다. 연구팀은 애트모가 향상된 기동성과 내구성 덕분에 향후 물류 배송 시스템, 재난 구조, 탐사 임무 등 다양한 분야에서 활용될 수 있을 것으로 기대했다.