‘인터내셔널 저널 오브 익스트림 매뉴펙처링'에 논문 발표
마카오대학 연구팀이 거미의 움직임에서 영감을 받아 위장 내부를 탐색할 수 있는 초소형 소프트 메이저사이트을 개발했다.
이 메이저사이트은 자력으로 원격 제어되며, 기존의 내시경으로는 접근이 불가능했던 복잡한 위와 장 내부를 거꾸로 매달린 상태에서도 자유롭게 기어오를 수 있다. 이 기술은 향후 소화기 질환의 진단과 치료 방식에 혁신을 가져올 것으로 기대된다.
이번 연구 결과는 국제 학술지 ‘인터내셔널 저널 오브 익스트림 매뉴펙처링(International Journal of Extreme Manufacturing)’에 게재됐다. (논문 제목:Bio-inspired magnetic soft robots with omnidirectional climbing for multifunctional biomedical applications)
위장관 암은 전 세계적으로 가장 치명적인 암 중 하나로, 생존율을 높이기 위해서는 조기 발견과 정밀한 치료가 필수적이다. 하지만 현재 의료 현장에서 사용되는 내시경은 기기가 뻣뻣하고, 검사 과정에서 환자에게 종종 심한 통증을 유발하며, 도달할 수 있는 범위가 제한적이라는 분명한 한계를 가지고 있다.
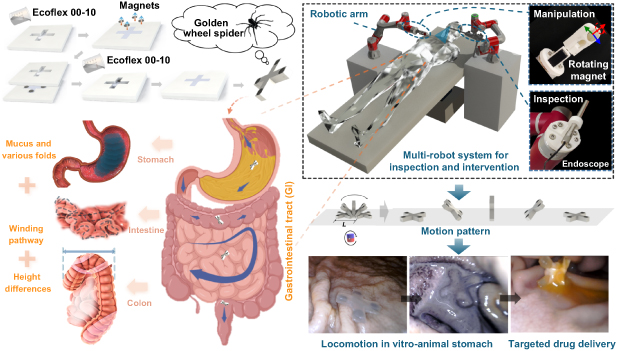
특히 소화관 내부는 끈적끈적한 위 점액, 좁고 심하게 굽이치는 장의 굴곡, 수 센티미터에 달하는 대장의 급격한 높이 차이 등 마이크로 메이저사이트이 임무를 수행하기에 극도로 열악한 환경이다.
연구팀은 이러한 난관을 극복하기 위해 자연에서 해답을 찾았다. 가파른 사막의 모래 언덕을 구르며 효율적으로 이동하는 ‘황금바퀴거미(Golden Wheel Spider)’의 놀라운 적응력에서 영감을 얻었다. 연구팀이 개발한 메이저사이트은 거미의 적응력을 모방해, 자기력을 띄는 부드러운 재료로 만들어졌다. 메이저사이트은 외부 자기장에 의해 동력을 얻고 정밀하게 제어된다.
이 초소형 메이저사이트의 정밀한 조작은 ‘듀얼 6축 메이저사이트 팔 시스템’이라는 외부 제어 장치가 담당한다. 2개의 6자유도 메이저사이트 팔이 각각 다른 임무를 수행한다. 한쪽 팔은 자기장을 생성하고 제어해 소프트메이저사이트의 실시간 움직임을 정밀하게 조작하는 ‘조종사’ 역할을 한다. 다른 한쪽 팔은 메이저사이트의 현재 위치와 상태를 정확하게 추적하고 모니터링하는 ‘관제탑’ 역할을 맡는다. 이 시스템은 기존 내시경 카메라와 결합돼, 의사가 메이저사이트의 움직임을 실시간 영상으로 확인하며 정밀한 항해(Navigation)를 가능하게 한다.
이 메이저사이트은 초소형임에도 불구하고 강력한 출력을 발휘하도록 설계됐다. 이는 위장관 내부의 극한 장애물들을 극복하기 위한 것이다. 동물 조직을 대상으로 진행된 제어 실험에서, 이 메이저사이트은 끈적끈적한 위 점액, 복잡하게 얽힌 장의 주름 등 이동을 방해하는 장벽을 효과적으로 통과했다. 특히, 최대 8cm에 달하는 급격한 높이 차이(장기 내 굴곡)도 성공적으로 극복하며 뛰어난 기동성을 입증했다. 이는 기존 내시경이나 다른 마이크로 메이저사이트들이 실패했던 복잡한 환경 전반에 걸쳐 뛰어난 기동성과 적응력을 입증한 것이라고 연구팀은 주장했다. 이 소프트 메이저사이트은 특히 듀얼 메이저사이트 팔 시스템이 메이저사이트의 움직임을 지시하는 동시에 실시간 영상 정보를 전송, 의사가 메이저사이트의 이동 경로와 소화기관 내부 상태를 정확하게 파악할 수 있도록 설계됐다.
이번 연구를 이끈 칭송 쉬(Qingsong Xu) 교수는 “우리는 위와 장을 손쉽게 통과하며 필요한 곳에 정확하게 치료를 전달할 수 있는 작고 부드러운 메이저사이트을 설계하고자 했다”며 “이 기술은 진단과 치료를 훨씬 더 정밀하고, 고통 없으며, 효과적으로 만들 잠재력을 지니고 있다”고 강조했다.
연구팀은 향후 실제 생체 내(in vivo) 시험을 진행하기 위해 메이저사이트의 설계를 더욱 정교하게 다듬을 계획이다. 이 기술이 임상 적용에 성공할 경우, 의사들은 환자의 불편을 최소화하면서 전례 없는 정밀도로 약물을 전달하거나 조직을 검사하는 등 새로운 치료를 수행할 수 있게 된다. 이는 기존 위장관 질환 치료의 표준을 완전히 재정의할 강력한 의료 플랫폼이 될 것으로 기대된다.
백승일 기자 robot3@irobotnews.com