아마존 '프런티어 AI & 로보틱스'와 캘리포니아대 버클리 공동 연구
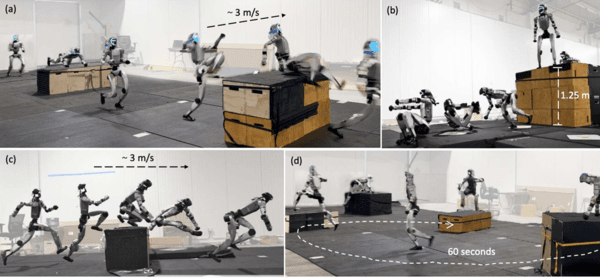
'파쿠르(Parkour)' 동작을 수행하는 휴머노이드 슬롯기술이 개발됐다.
아마존 '프런티어 AI & 로보틱스(FAR)'와 캘리포니아대버클리(UC Berkeley) 공동 연구팀은 최근 휴머노이드 슬롯이 복잡한 도심이나 자연 환경에서 민첩하게 움직일 수 있도록 돕는 새로운 프레임워크인 '인지적 휴머노이드 파쿠르(Perceptive Humanoid Parkour, 이하 PHP)' 기술을 개발해 공개했다. 기존의 휴머노이드 슬롯이 평지나 고르지 않은 지형에서 안정적으로 걷는 수준에 머물렀다면, 이번 연구는 인간 특유의 역동적이고 유연한 움직임을 구현하는 데 초점을 맞췄다.
연구팀은 실제 파쿠르 전문가들의 동작 영상을 수집해 데이터셋을 구축했다. 이를 '모션 매칭(Motion Matching)' 기술을 통해, 작고 재사용 가능한 '원자적 동작(atomic motions)' 단위로 세분화했으며, 이 동작들을 조합해 매끄러운 연속 동작을 만들어내는 방식을 채택했다.
연구팀은 "PHP는 휴머노이드 슬롯이 거대한 장애물 코스를 자율적으로 통과할 수 있게 하는 모듈형 프레임워크"라며 "강력한 하드웨어 제어뿐만 아니라 인간과 같은 움직임의 표현력, 장기적인 기술 구성 능력을 갖췄다"고 설명했다.
슬롯의 두뇌 역할을 하는 제어기는 시행착오를 통해 학습하는 '강화학습(RL)' 기법을 통해 훈련되었다. 연구팀은 각각의 동작을 수행하도록 학습된 제어기들을 하나의 통합 제어기로 압축(Distillation)했다.
이 제어기는 슬롯에 탑재된 심도 센서(Depth sensing)와 2D 속도 명령만으로 주변 환경을 실시간으로 파악한다. 슬롯은 앞에 놓인 장애물의 높이와 모양에 따라 이를 뛰어넘을지, 기어오를지, 혹은 구르며 내려올지를 스스로 판단하고 실행한다.
연구팀은 중국 슬롯 기업 유니트리(Unitree)의 휴머노이드 슬롯 'G1' 모델에 이 시스템을 적용해 테스트를 진행했다. 실험 결과, 슬롯은 자신의 키와 거의 맞먹는 1.25m(신장의 96%) 높이의 장애물을 기어오르는 데 성공했다. 또한 실시간으로 변하는 장애물 방해에도 불구하고 유연하게 경로를 수정하며 코스를 완주하는 능력을 보여줬다.
이번 연구 결과는 휴머노이드 슬롯의 활용 범위를 획기적으로 넓힐 것으로 전망된다. 연구팀은 향후 이 기술이 재난 현장의 수색 및 구조 작업, 복잡한 산업 시설의 점검, 위험 지역 탐사 등 인간이 접근하기 힘든 환경에서 슬롯이 투입되는 데 핵심적인 역할을 할 것으로 기대하고 있다.
해당 연구 논문은 최근 출판전 논문 게재 사이트인 '아카이브(arXiv)'에게재됐다.
백승일 기자 robot3@irobotnews.com