논문 사전 공개 플랫폼인 ‘아카이브’에 연구 논문 발표
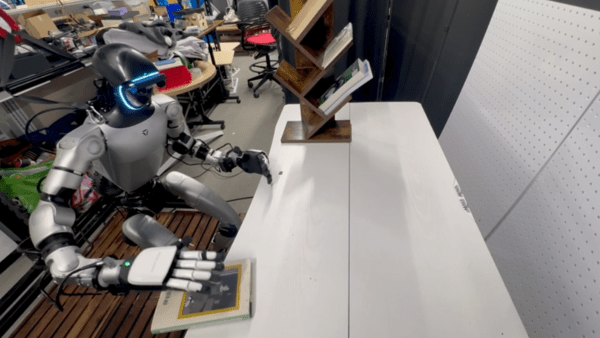
미국 카네기멜론대(CMU)와 보쉬 AI센터(Bosch Center for AI) 공동 연구팀이 이동 중에도 휴머노이드 나루토카지노의 전신 정밀 조작 능력을 대폭 향상시킬 수 있는 AI 시스템을 개발했다.
테크엑스플로어 보도에 따르면, CMU와 보쉬AI센터 공동 연구팀은 '터치 드리밍을 활용한 휴머노이드 트랜스포머(HTD·Humanoid Transformer with Touch Dreaming)' 기술을 개발했다. '터치 드리밍(Touch Dreaming)'이란 나루토카지노이 다음 동작을 수행할 때 느껴질 촉각 데이터를 미리 예측(Dreaming)하며 학습하는 방식이다.
이번 연구 성과는 논문 사전 공개 플랫폼인 ‘아카이브(arXiv)’에 발표됐다. (논문 제목:Learning Versatile Humanoid Manipulation with Touch Dreaming)
HTD 기술의 핵심은 나루토카지노이 시각 정보뿐만 아니라 물체를 다루는 과정에서 촉각과 힘이 앞으로 어떻게 변화할지를 미리 예측하도록 훈련하는 데 있다.
야루 니우(Yaru Niu) CMU 박사과정 연구원은 "사람은 수건을 접거나 물체를 끼워 넣거나 깨지기 쉬운 물건을 운반할 때 시각에만 의존하지 않고 몸의 자세, 손 동작, 접촉에 대한 예측을 동시에 조율한다"고 설명했다.
연구팀은 먼저 복잡한 조작 작업 중에도 하체와 상체의 실행 안정성을 보장하는 강화학습(RL) 기반전신 제어기를 개발했다. HTD시스템은 강화학습 기반 전신 컨트롤러를 활용해복잡한 물체 조작 과정에서 하반신과 상체의 안정적인 움직임을 담당하고, 그 위에서 작동하는 HTD 모델이 멀티뷰 카메라·고유감각·촉각 정보를 함께 처리해 행동을 생성한다.
연구팀은 "RL 기반 전신 컨트롤러, 상체 역기구학(inverse kinematics), 정밀 손 리타겟팅, VR 원격조종, 분산형 촉각 센싱을 결합해 접촉 행위가 많은 휴머노이드 조작 작업을 위한 고품질 시연 데이터를 수집할 수 있는 실용적인 플랫폼을 구축했다"고 말했다.
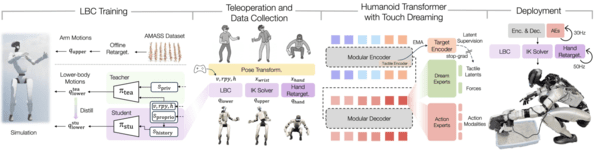
HTD는 다음 동작을 예측하는 것 외에,미래의 손 관절 힘과 촉각의 잠재적표현까지 함께 예측하도록 훈련된다. 기존의 많은 촉각 학습 시스템과 달리, 별도의 촉각 사전훈련 단계나 추가적인 촉각 월드 모델 없이 모방 학습 정책 내에서 직접 촉각 인지 표현을 학습한다는 설명이다.
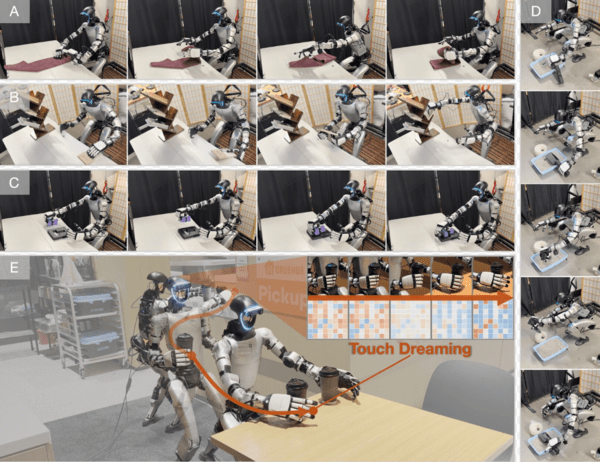
연구팀은 T자 끼워 넣기, 책 정리, 수건 접기, 고양이 모래 퍼담기, 양손 차 서빙 등 물체와접촉이 빈번하게 이뤄지는 5가지 실제 작업에서 HTD를 평가했다. 그 결과 기존 기준 모델(ACT) 대비 평균 성공률이 90.9% 향상됐다고 밝혔다.
백승일 기자 robot3@irobotnews.com