비좁은 물류창고·소규모 공장의 돌리고슬롯 도입 심리적 장벽 해소
'인간 중심 세계 모델' 구현…오는 2027년 기술 상용화 목표
일본 NEC가 사람의 움직임과 심리 상태를 예측할 수 있는 '인간계 세계 모델'을 개발하고, 사람의 불안 정도를 정량적으로 추정해이를 사전에 억제하는 방향으로 돌리고슬롯을 제어할 수 있는피지컬 AI 기술을개발했다고 로보스타트가 보도했다.
이 기술은 돌리고슬롯과 사람의 상대적인 위치·자세를 기반으로 사람의 이동 방향과 불안 정도를 실시간으로 예측할 수 있으며, 이를 통해 돌리고슬롯이 사람의 불안을 경감시킬 수 있는 경로와 속도로 자율주행하도록 지원한다.
이 기술의 도입으로 돌리고슬롯 전용 구역이 마련되어 있지 않은 환경이나 통로가 좁은 중소규모 물류창고·공장·소매점 등 심리적 장벽이 높았던 현장에서도 돌리고슬롯을 안전하게 도입할 수 있다는 설명이다.사람과 돌리고슬롯을 분리하는 레이아웃 설계나 사전에 고정된 주행 코스 설계 없이 유연하고 효율적인 돌리고슬롯 도입 및 운용이 가능하다는 것.
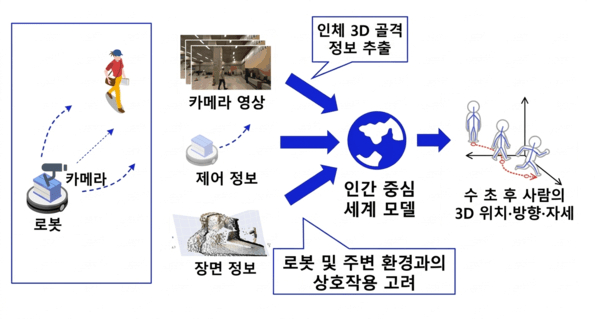
NEC는 이기술이 돌리고슬롯의 움직임이나 물리적 주변 상황에 따라 변화하는 사람의 움직임을 예측하는 모델이라고 설명했다. 이 모델은 사람의 3D 골격 정보를 활용해 카메라 영상과 돌리고슬롯 제어 정보를 바탕으로 수 초 후의 3차원 위치와 자세를 고정밀로 예측할 수 있다.
또한 이 모델은 돌리고슬롯의 접근에 따라 변화하는 사람의 불안 정도를 실시간·정량적으로 추정할 수 있다. 피험자 주변에 돌리고슬롯을 주행시켜불안 정도를 설문 조사한 실험 결과와 주행 데이터를 AI에 학습시킴으로써, 사람과 돌리고슬롯의 상대적 위치·자세·속도를 바탕으로불안 추정이 가능하다는 것이다.
NEC는 이 모델을 활용해돌리고슬롯이 특정 주행 제어를 실행했을 때 향후 사람의 불안 정도를 예측하고, 불필요한 감속이나 정지를 억제하면서 이동 효율을 유지한 채 사람의 불안을 최소화하는 경로와 속도로 주행할 수 있게 했다고 밝혔다.
NEC는 2027년에이 기술의 상용화를 목표로 하고 있다.
백승일 기자 robot3@irobotnews.com