'사이언스 로보틱스'에 연구 논문 발표
네덜란드 델프트공대(TU Delft) 연구팀이 여러 대의 자율 드론이 협력해 강풍 속에서도 무거운 화물을 제어하고 운송할 수 있는 새로운 알고리즘을 개발했다 이번 연구는 해상 풍력 터빈 등 접근이 어려운 인프라의 점검과 유지보수에 활용될 가능성이 높다.
연구팀은 국제 학술지인 사이언스 로보틱스(Science Robotics)에 연구 성과를 발표했다.(논문 제목:Agile and cooperative aerial manipulation of a cable-suspended load)
시하오 순(Sihao Sun) 델프트 공대 알파벳카지노공학 연구원 은 “드론 한 대는 매우 제한된 하중밖에 운반할 수 없다. 이 때문에 외딴 지역에 건축 자재를 운반하거나 산악 지역에서 농작물을 실어 나르거나 구조 임무에 투입하기가 어렵다”라고 말했다.
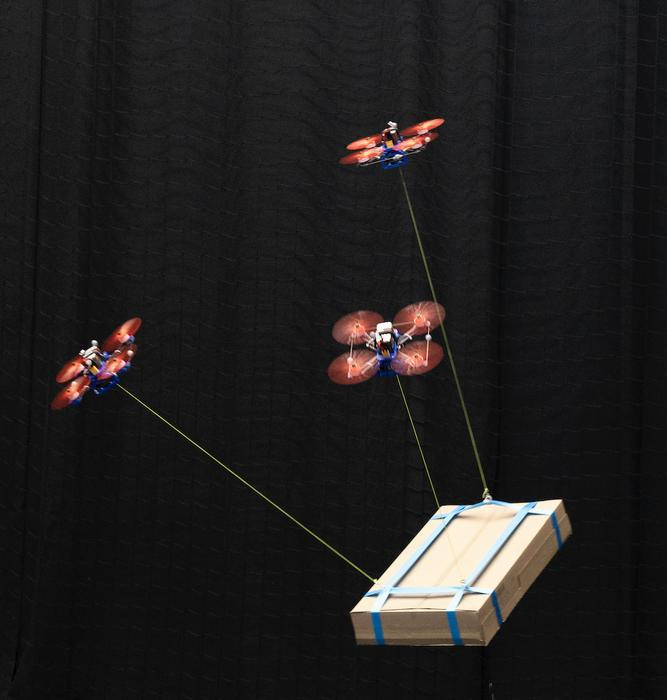
연구팀은 이러한 한계를 극복하기 위해 여러 대의 드론을 케이블로 하나의 화물에 연결해 협력 운송하는 시스템을 설계했다. 각 드론은 실시간으로 위치를 조정하며 무거운 물체를 들어 올리는 동시에 물체의 방향까지 제어할 수 있다. 이는 복잡한 환경에서 정밀한 배치가 필요한 작업에 필수적인 기능이다.
순 연구원은 “진정한 과제는 ‘협응’이다. 드론들이 물리적으로 연결되면 서로의 움직임뿐 아니라 화물의 갑작스러운 동작에도 즉각 대응해야 한다. 기존 제어 알고리즘은 이러한 상황을 처리하기엔 너무 느리고 경직되어 있었다”라고 말했다.
연구팀이 개발한 새 알고리즘은 빠르고 유연하며 견고한 것이 특징이다. 화물에 별도의 센서를 부착하지 않아도 외부 힘의 변화를 보상하며, 변화하는 화물 상태에 적응할 수 있다.
실험은 통제된 실내 환경에서 최대 4대의 쿼드로터 드론을 이용해 진행됐다. 연구팀은 장애물 코스와 선풍기로 만든 바람, 농구공처럼 움직이는 화물 등을 활용해 시스템의 동적 반응을 검증했으며, 모든 테스트를 성공적으로 통과했다. 드론들은 목적지만 입력하면 자율적으로 장애물을 피하고 경로를 조정해 임무를 수행했다.
현재 시스템은 실험실 내 모션 캡처 카메라를 기반으로 작동하고 있어 실외 환경에서는 아직 활용이 어렵다. 연구팀은 향후 이 기술을 발전시켜 수색 및 구조, 농업, 원격지 건설 등 실제 현장 적용을 목표로 하고 있다.
백승일 기자 robot3@irobotnews.com