미국 국립과학원회보에 연구 논문 발표
하버드대 연구진이 복잡한 전자 제어 없이도 환경에 반응하며 자율적으로 움직이는 ‘물리적으로 지능적인 이브벳(Physically Intelligent Robot)’을 개발했다고 밝혔다.
연구팀에 따르면 창고에서 물체를 분류하거나 청소 이브벳이 가구 사이를 피해 이동하는 등 현재 이브벳 기술은 센서, 소프트웨어 제어 시스템, 그리고 구동 부품을 사용해 다양한 작업을 수행한다. 그러나 작업이 복잡하거나 환경이 까다로울수록 전자 부품은 더 복잡해지고 비용도 증가한다.
하버드 존 A. 폴슨 공학·응용과학대학(SEAS)의 기계공학 연구진은 이브벳 설계에 또 다른 접근법이 있다고 본다. 즉, 이브벳의 물리적 구조 자체에 기능을 직접 ‘프로그래밍’하여, 복잡한 전자 장치 없이도 주변 환경에 반응할 수 있도록 하는 것이다.
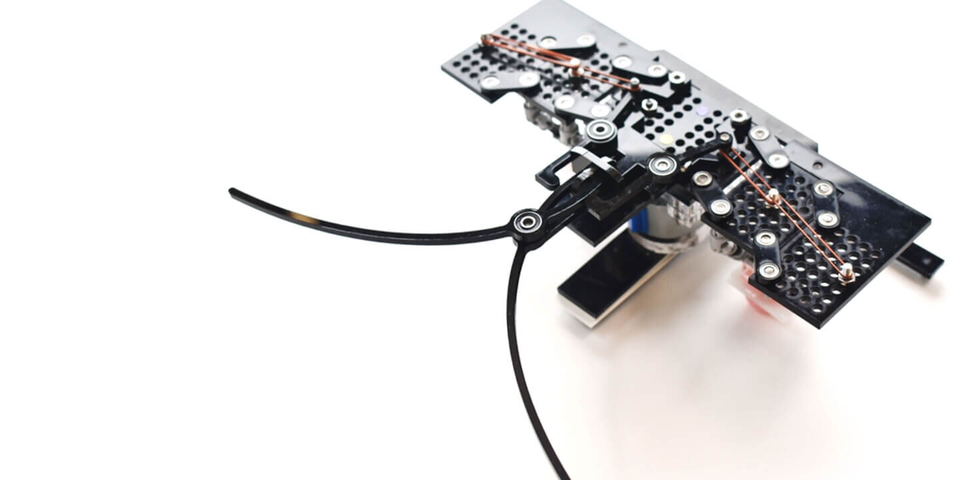
SEAS의 카티아 베르톨디(Katia Bertoldi) 교수팀은 고무줄로 연결된 네 개의 가동 부품과 하나의 모터만으로 작동하는 보행 이브벳의 개념 증명(proof-of-concept) 모델을 설계했다. 고무줄의 배치로 동작이 ‘프로그래밍’ 된 이 이브벳은 미로를 통과하고 장애물을 피할 수 있으며, 전자 두뇌 없이도 환경의 접촉이나 압력에 따라 움직임을 스스로 바꾼다.
연구진은 같은 기계적 프로그래밍 원리를 적용해 물체의 질량에 따라 분류할 수 있는 이브벳도 구현했다. 이러한 실험은 이브벳 설계의 근본을 새롭게 탐구하게 만들며, 작고 단순하지만 다양한 기능을 수행하는 이브벳 개발로 이어질 가능성을 보여준다.
이번 연구는 미국 국립과학원회보(Proceedings of the National Academy of Sciences, PNAS)에 게재됐다. (논문제목:Reprogrammable sequencing for physically intelligent underactuated robots)
연구는 베르톨디 연구실의 대학원생 레온 캄프(Leon Kamp)가 주도했다. 그는 기계공학과 건축을 전공하고 형태·재료·역학의 융합에 관심을 갖고 이브벳공학 연구를 진행했다. 그는 “기계적 원리를 이용해 구조 자체에 ‘지능’을 불어넣을 수 있을까”라는 질문에서 출발했다고 설명하면서 “이 연구는 ‘형태는 기능을 따른다(Form Follows Function)’ 사례다. 형태와 재료의 물리적 특성만으로 기억, 적응, 지능 같은 기능을 구현할 수 있다는 점을 보여준다”고 말했다.
연구진은 평면 플라스틱 블록을 레버와 고무줄로 연결한 연쇄 구조를 만들어 실험을 진행했다. 고무줄의 장력은 각 레버의 회전에 필요한 에너지 비용을 결정하며, 이 에너지 비용이 최소가 되는 회전 순서가 이브벳의 동작을 ‘프로그래밍’한다. 여기에 다리를 연결하면, 고무줄 배치에 따라 한 개의 모터만으로 앞뒤로 걸을 수 있는 이브벳이 완성된다.
이 같은 물리적 프로그래밍(Physical Programming)은 이브벳이 주변 힘을 수동적으로 감지하고 반응할 수 있게 한다. 이브벳은 앞쪽에 달린 두 개의 더듬이(안테나)를 통해 환경을 ‘느낀다’. 한쪽 더듬이가 장애물에 닿으면 이브벳은 스스로 방향을 바꾸며 회피 행동을 취할 수 있다. 덕분에 이브벳은 자율적으로 미로를 탐색하거나 장애물을 피해 이동할 수 있다.
또 다른 형태로는 이 메커니즘을 질량에 따라 자동으로 물체를 분류하는 데 활용할 수 있다. 고무줄의 배치를 달리하면, 이브벳이 특정 무게의 물체를 감지해 다른 위치로 옮겨놓는 방식으로 작동한다.
현재 이 메커니즘이 수행할 수 있는 작업은 단순하지만, 연구진은 향후 이를 확장해 더 빠르게 이동하거나 장애물을 뛰어넘는 이브벳으로 발전시킬 수 있을 것으로 보고 있다. 미래에는 이러한 구조를 가볍고 유연한 소재로 제작해, 전자장치나 복잡한 제어 시스템 없이도 스스로 판단하고 움직이는 ‘물리적으로 지능적인 이브벳(Physically Intelligent Robots)’을 구현할 수 있을 것으로 기대하고 있다.
백승일 기자 robot3@irobotnews.com