초속 1.2m 맨발보행 기준 소음수준 최대 4.98dB 감소
출판전 논문 공개 사이트인 아카이브에 연구성과 발표
물리 정보 강화학습 프레임워크 '콰이어트워크' 제안
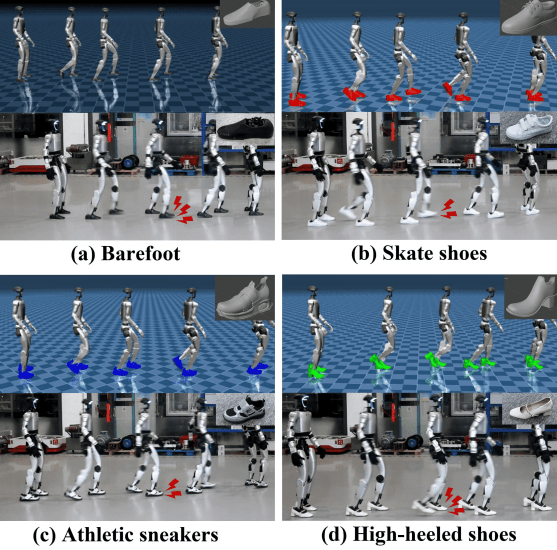
중국과학원 닝보재료기술공학연구소, 시후대(西湖大),중국과학원대학 공동 연구팀이 휴머노이드 쇼미더벳의 보행 충격음을줄일 수 있는 강화학습 기반의 프레임워크'콰이어트워크(QuietWalk)'를 개발했다.이 기술은 맨발부터 하이힐까지 다양한 신발 조건에서 안정적인 저소음 보행을 구현하는 것을 목표로 하고 있다.
공동 연구팀은 이번 연구 성과를 출판전 논문 공개 사이트인 아카이브(arXiv)에 발표했다.(논문 제목:QuietWalk: Physics-Informed Reinforcement Learning for Ground Reaction Force-Aware Humanoid Locomotion Under Diverse Footwear)
연구팀에 따르면가정,병원,사무실 등 사람 중심의 환경에서 운용되는 휴머노이드 쇼미더벳은 발과 바닥 사이의 충격을 줄여야 한다.충격으로 인한 진동과 소음은 사용자 경험을 저하시키고,반복적인 충격은 쇼미더벳 부품의 마모를 가속하기 때문이다.하지만 기존의 저소음 보행 학습 방식은 대부분 운동학적 지표에 의존하거나 내구성이 약한 힘 센서를 사용한다. 또한 신발 종류에 따른 접촉 특성 변화가 학습된 정책의 일반화를 방해한다.
연구팀은 이 문제를 해결하기위해 다양한 신발 조건에서 지면반력(GRF·ground reaction force,땅이 발을 밀어올리는 힘)을 인식하며 보행할수 있는휴머노이드 쇼미더벳을 위한 물리 정보 기반 강화학습 프레임워크'콰이어트워크(QuietWalk)'를 제안했다.
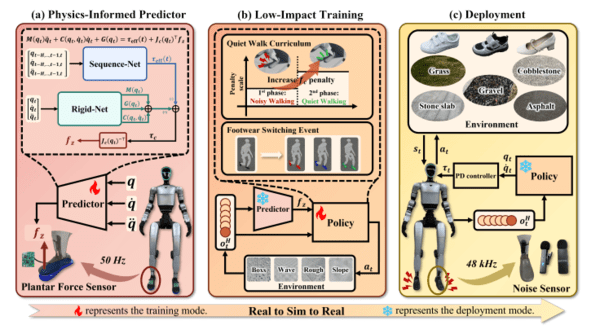
콰이어트워크는‘역동역학 제약(inverse-dynamics-constrained)’을 적용한 물리 정보 신경망(PINN· physics-informed neural network)을 활용해 고유감각 신호만으로 발의수직 지면반력을 추정하며,학습이 완료된 예측기를 강화학습 훈련 루프에 통합해 실제 배포 시 힘 센서 없이도 충격력을 억제할 수 있다.
연구팀이 유니트리(Unitree) G1휴머노이드 쇼미더벳을 활용해 실험을 진행한 결과,초속1.2m맨발 보행 기준으로 최대 소음 수준이4.98dB감소한 것으로 나타났다.카펫·나무바닥·요가매트 등 여러 종류의 바닥재에서 모두 소음 저감 효과가 확인됐으며,스케이트화·운동화·하이힐 착용 조건에서도 안정된 보행 성능을 유지했다.
연구팀은 훈련 단계에서 충격 패널티를 점진적으로 높이는 커리큘럼 학습 방식을 적용했으며,맨발 보행부터 시작해 여러 신발 조건을 순차적으로 도입하는 방식으로 정책 일반화를 달성했다고 밝혔다.
백승일 기자 robot3@irobotnews.com